IBM全称Immersed Boundary Method,译为浸入式边界法,其核心思想是将固体物体视为流体域的一部分,通过一定的数值处理模拟出固体域对流体的影响。
相比于贴体网格,IBM求解不需要对几何表面进行额外的近壁面边界层网格划分,极大的简化了网格生成过程,可以处理复杂的几何模型。IBM网格通常为基于八叉树划分的笛卡尔网格,网格质量高,此外由于没有边界层流动特性,其计算效率更高,速度更快,可以对复杂工程问题进行快速数值仿真计算。
1 DIMAXER软件IBM功能
静态IBM+dynamicIBM
IBM算法的核心思想是通过引入一种“力源项”,将固体边界上的约束条件转化为流体运动方程中的附加力,从而间接实现边界条件的施加。经典的Peskin的IBM方法就是在边界上引入一些marker点,各个点的速度和期望的速度之间的差值用Delta函数加权计算力,然后分布到边界附近网格内。
DIMAXER软件IBM功能提出了更加简单高效的方式来识别边界并施加虚拟力源项,即通过流场中网格到几何物面的壁面距离来判定计算域,定义壁面距离大于零为流体域,小于零为固体域,等于零为几何物面。
1.1 静态IBM功能
CAE仿真中,网格量与计算量的权衡是确保结果精度与效率平衡的核心问题。几何物面通过壁面距离的零等值面来描述的,相应的网格越精细,壁面距离越准确,几何描述也就越准确,但一味的靠加密网格来实现精准描述几何的目的,又会带来计算量过大的效率问题。
基于DIMAXER高阶通量算法每个网格内部有多个求解点的特性,要求最终的计算网格FinalMesh尽可能的粗。为解决该矛盾,DIMAXER软件采用两套网格方案:
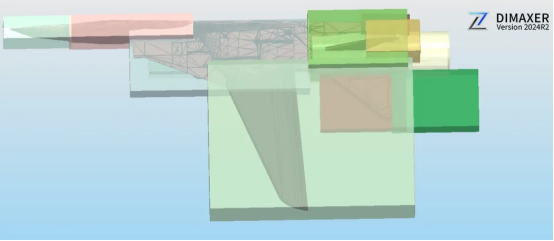
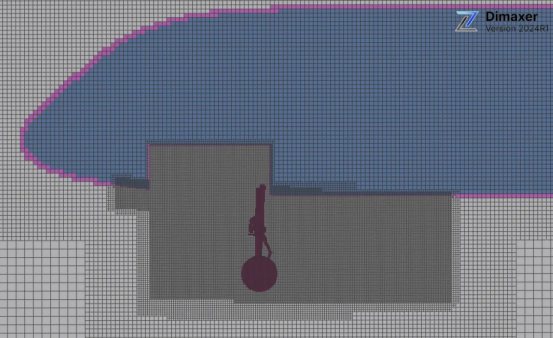
(1)使用更密的精密网格(Precise Mesh, 下图红色网格)对几何进行描述,求得更准确的壁面距离
(2)将壁面距离插值到具有多个求解点的计算网格(Final Mesh,下图蓝色网格)
通过两套网格方案,DIMAXER软件既保证了几何物面的准确性,又控制了计算网格的数目,实现了较好的平衡。
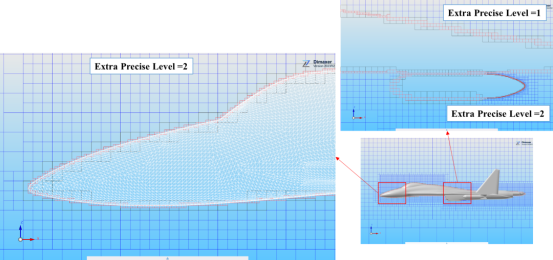
IB网格Precise+Final Mesh方案
1.2 动态IBM功能(dynamicIBM)
动态IBM功能(dynamicIBM)基于静态IBM进行了拓展,主要用于处理复杂的刚体运动(含复合运动)问题,其主要思路是:
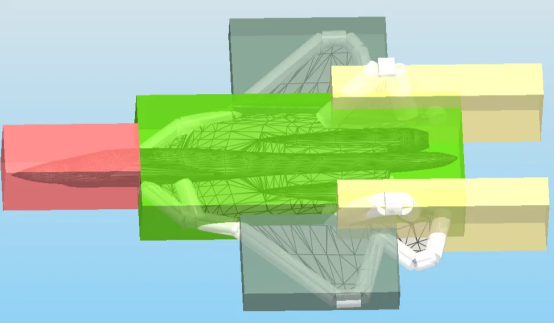
将运动体的固体域抽离出来,生成对应正确的壁面距离文件作为数据源,流体域的网格在计算过程中,不断从固体域中插值壁面距离,从而知晓特定时刻固体的运动位置,并在速度项中修正为固体对应的运动速度,来模拟真实物理过程中运动带来的流场变化。
在固体与流体的交界区域,IBM通过插值处理相互作用,确保边界条件准确传递。
未插值的流体域网格
DIMAXER软件dynamicIBM功能具有极大的灵活性,只要用户能够将运动部件剥离出来生成正确的壁面距离文件和指定对应的物理规律,就能够处理任意复杂部件的任意复合运动过程。且允许多个部件发生重叠干涉,部件在运动中离开或进入计算域等操作,相比传统贴体网格的重叠网格算法处理大变形刚体运动,自由度更高,适应性更强。
此外,dynamicIBM功能不仅支持处理预定义规律的刚体运动,还可以处理六自由度的被动运动。
1.3 混合IBM功能
混合IBM功能是将静态IBM与dynamicIBM结合使用的过程,dynamicIBM要求的固体域独立的壁面距离文件保持原有操作逻辑,流体域的网格可以允许使用静态IBM进行定义,从而实现混合IBM功能。
典型应用场景为无人机仿真时,将旋翼作为运动部件采用动态IBM方式生成对应文件,将机身所在的流体域按静态IBM方式生成对应文件,二者组合实现最终效果。
此外,基于DIMAXER软件动静态混合IBM功能可以对赛车模型的轮胎转向复合运动进行快速大涡模拟:
2 DynamicIBM功能应用
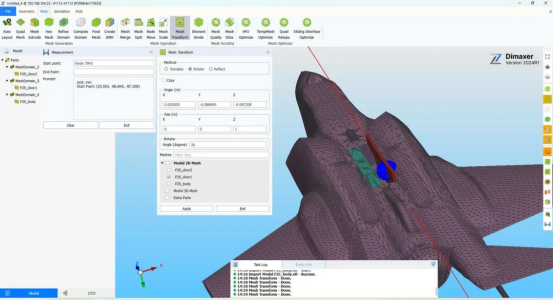
2.1 Su-57落叶飘
Su-57作为一款五代战机,其在低速飞行和卓越的机动特性中表现出色。例如,在落叶飘运动中,它可以保持良好的控制性和稳定性。
|
Su-57战机 |
机翼边缘区域网格局部加密 |
基于DIMAXER软件dynamicIBM功能进行Su-57战机在落叶飘过程中的动态模拟,相关计算数据如下:
2.2 战斗机投弹
在超声速条件下,内埋舱和舱门的打开、弹体投放过程涉及复杂的气动效应和流场变化,尤其是在高速气流作用下,舱门的开启可能引起强烈的气动干扰和气动载荷。本算例重点模拟内埋舱及舱门打开时,舱门与周围流场的相互作用及弹体投放过程的影响。
基于DIMAXER软件dynamicIBM功能可实现对战斗机在超声速飞行过程中舱门打开、投放弹体动态过程模拟。
模拟工况为超声速巡航状态,采用5卡并行计算,计算完成花费约356GPU时:
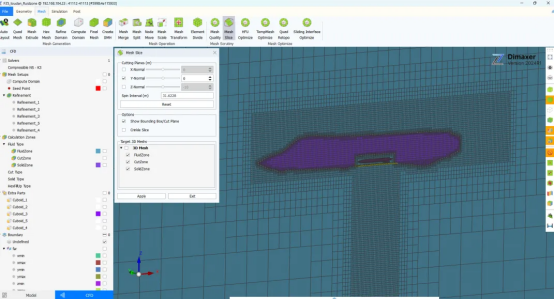
2.3 后掠翼
传统固定翼型适用的速度范围比较狭窄,而可变后掠翼就可以让飞机同时兼顾低速性能和高速性能。
本算例基于DIMAXER软件dynamicIBM功能,模拟战斗机在超音速飞行过程中后掠翼收放动态过程,重点关注翼面周围流场的动态变化及激波在翼面周围流场中形成和传播。
局部加密 流体域网格展示
相关计算数据如下:
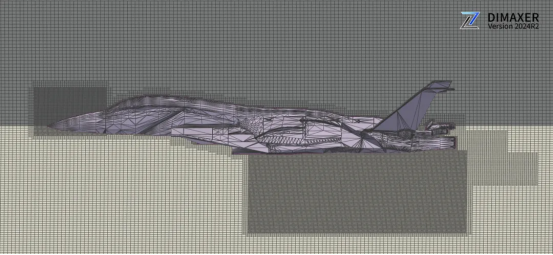
2.4 舰载机起飞
航母舰载机的起飞一般发生在狭窄的飞行甲板上,舰载机需要在极短的距离内完成加速和升空。这一过程不仅需要考虑飞机本身的空气动力学特性,还需要考虑飞行甲板的环境因素,如甲板的风速、风向以及舰船的运动等。此外,舰载机起飞过程中,还需要应对复杂的流体力学和气动加载效应,这些效应可能影响飞机的起飞性能,甚至危及飞行安全。
基于DIMAXER软件dynamicIBM功能,对舰载机加速、起飞、抬升过程进行数值模拟,流体域着重加密舰载机飞行过程中移动扫掠过的区域,最终流体域网格数量为620w:采用8卡并行计算,计算完成花费约288GPU时:
2.5 起落架收放
民用客机起飞后,起落架回收涉及复杂的气动效应和流场变化。随着起落架的运动,这些变化还会影响到舱门内的流场。
采用DIMAXER软件dynamicIBM功能模拟该过程,重点关注起落架回收时,周围流场的相互作用及气动特性变化,实现对民用客机在起飞后起落架回收动态过程模拟。
流体域网格
相关计算数据:
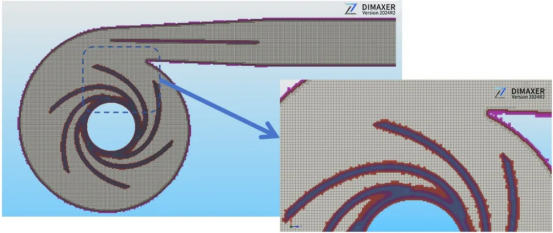
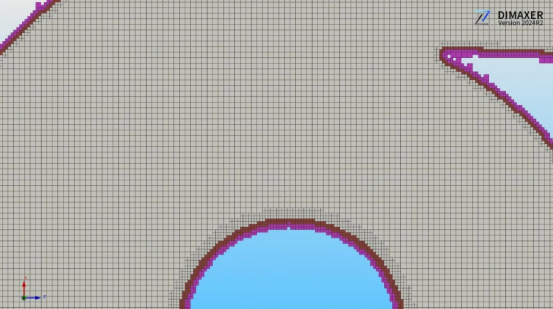
2.6 潜艇螺旋桨旋转运动+鱼雷水下发射
由于螺旋桨是旋转状态,周围流体区域需要动态调整网格,从而带来计算不稳定及精度问题。鱼雷水下发射涉及发射装置-鱼雷耦合运动,这会导致网格变形或者需要动态网格技术。动网格处理不好会影响仿真精度,比如网格扭曲过大问题。
基于DIMAXER软件dynamicIBM功能,可实现螺旋桨旋转运动+鱼雷水下发射两种运动的仿真模拟: