新一代CAE/CFD
低比转速离心泵的出口宽度小、流道狭长,特别是具有后置导叶的离心泵,在高速转动下动静转子间存在着剧烈的动静干涉作用,这使得流体在通道内的流动变得非常复杂,容易发生流动分离和涡流,给仿真带来很大挑战。
本案例基于Dimaxer 2024R1动网格计算方法对Genova离心泵进行仿真计算,重点验证动静交界面无精度损失。
01 网格划分
Meshing
本案例采用非结构六面体网格,离心泵半径为0.37m,主要包括旋转域与静止域两部分,网格数量22万。在k1精度下对应求解点176万,K3精度下对应求解点1400万。
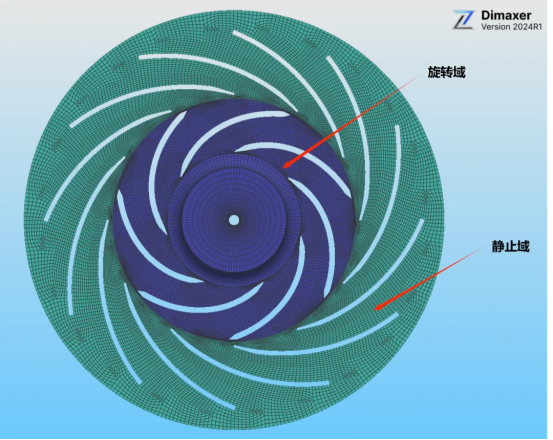
网格示意图
02 工况配置
Scenario configuration
边界条件参数:
| 边界类型 |
边界条件 |
| 进口 | 总温总压进口:总压100345Pa;总温288k |
| 出口 | 压力出口 101325Pa |
| 转速 |
2000rpm |
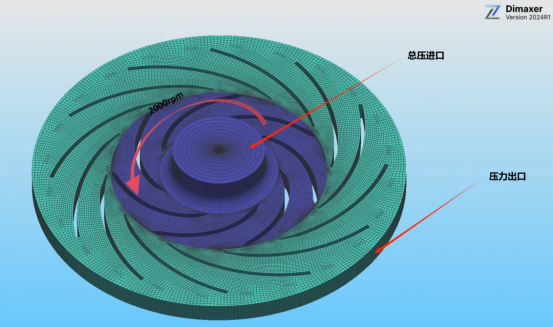
边界条件示意图
03 计算流程
Calculation process
在进行离心泵的计算时,由于其结构复杂再加上机械旋转,流动更加复杂。Dimaxer软件采用显式时间推进方式,对初场较为敏感,为获得一个稳定的初场条件,首先进行K1低精度计算,转速为2000RPM。随后从K1低精度转为K3高精度进行计算,K3高精度的计算以K1低精度结果做初场条件,求解点从22万提升至1400万,可以捕获更多流场细节。
关于PLC
PLC是Dimaxer软件中独有的一种稳定化参数,适用于处理激波类间断问题,其基本思路是引入分段常数来消除高频脉动信息。总的来说,PLC权重越大,流场越趋向于平均结果,脉动信息少,稳定性更高;PLC权重越小,可获得更丰富的流场信息,解析精度越高。实际算例计算过程中可充分利用PLC机制以实现解析度高、稳定性好的目标。
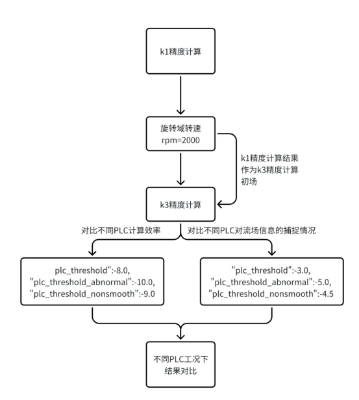
计算流程示意图
04 结果分析
Analysis of results
k1精度计算结果
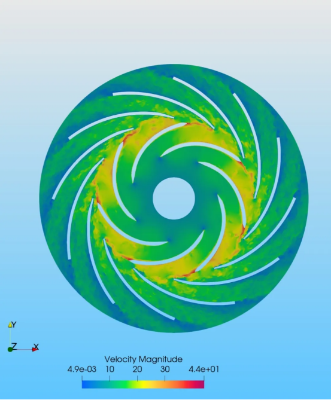
速度云图
从上述k1精度计算结果可以看出旋转效果,整体流场趋于稳定。由于精度较低,求解点仅22万,导致流场内看不出太多非定常湍流脉动效果,其解析度基本与RANS持平。
k3精度计算结果
以上述K1结果做初场,进行K3四阶精度计算,求解点提升至1400万,可以捕获更多流动细节。
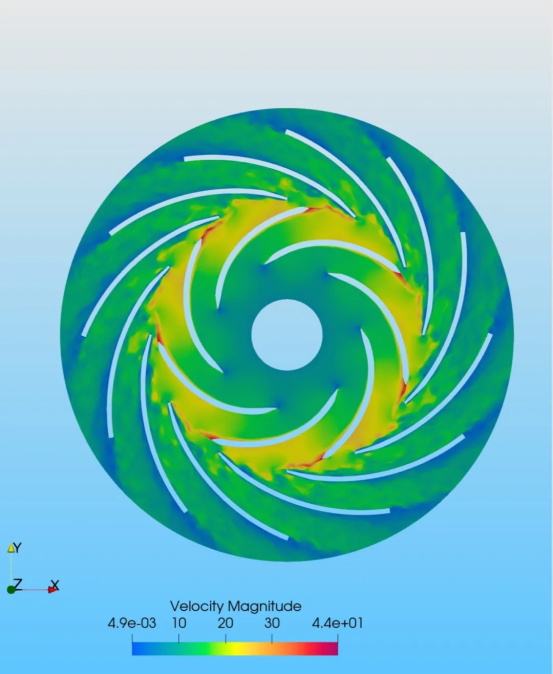
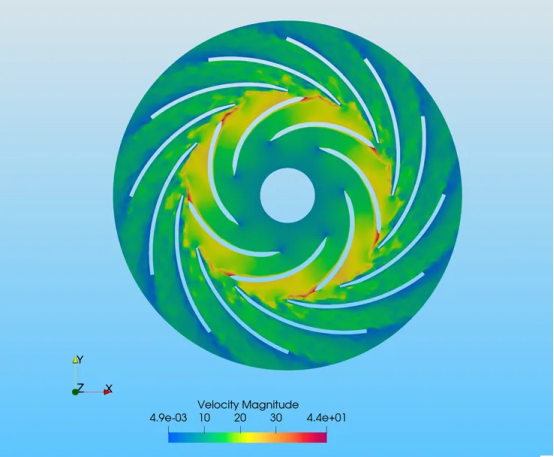
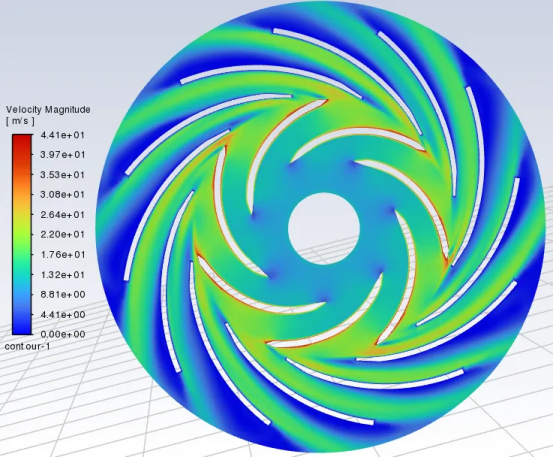
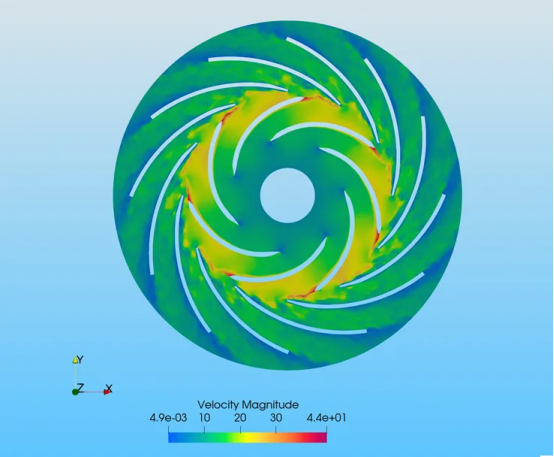
速度云图:
工况1(PLC_threshold=-3.0)
工况2(PLC_threshold=-8.0)
Q等值面图:
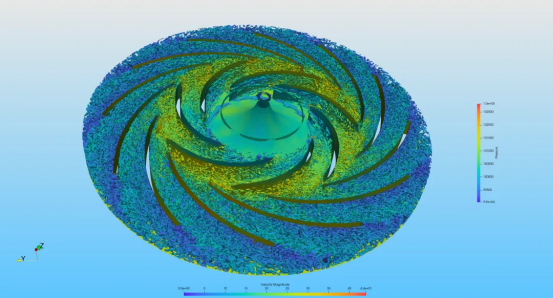
工况1(PLC_threshold=-3.0)
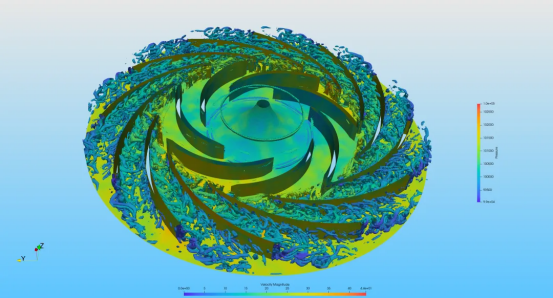
工况2(PLC_threshold=-8.0)
能谱衰减度Spectral Energy Decay可以一定程度表征当地结果中高频量的解析程度,其值越大,表示高频信息越丰富。PLC Threshold表示触发PLC稳定化措施的SED阈值,当地SED大于给定的PLC Threshold时候,则施加一定PLC权重抹除高频信息。如上图所示,工况2 PLC Threshold相比工况1给的更小,则更容易触发PLC机制,抹除部分高频脉动信息。但相应的,其计算稳定性会大大提升。
速度云图:
工况1(PLC_threshold=-3.0)
工况2(PLC_threshold=-8.0)
Q等值面图:
工况1(PLC_threshold=-3.0)
工况2(PLC_threshold=-8.0)
从以上计算结果对比中可以看到,PLC权重越少(对应工况1PLC Threshold越大),其捕捉到的湍流效果越明显,流场信息更精确。
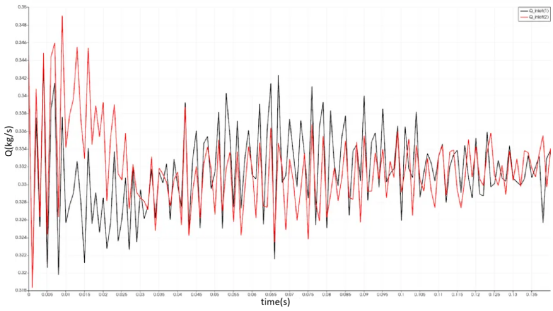
进口流量变化图
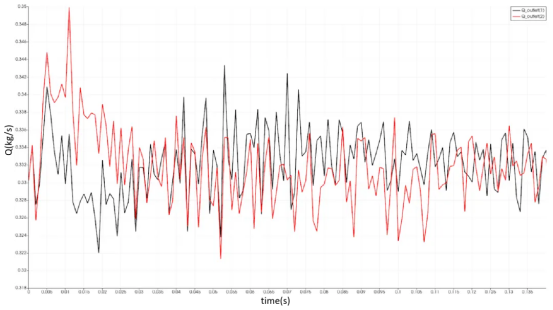
出口流量变化曲线
当流场稳定之后,两种PLC工况下流量变化相差较小,这说明PLC的改变只会对流场的捕捉有差异,但是对流量的计算是完全相符的。
|
工况 |
相同时间步长计算时间(s) |
|
工况1 (PLC_threshold=-3.0) |
|
|
|
|
从上述计算时间可以看出,PLC权重越多(对应工况2 PLC Threshold越小),其计算效率越高。理由是其抹除了部分高频湍流脉动信息,当地时间步长更均匀一致,在GPU下计算起来更快;反之,PLC权重少的工况,湍流脉动明显,存在局部更小的当地时间不长,需要计算的时间更久一些。因此,选择合适的PLC,在保证流场信息无误的情况下,提高计算效率是很有必要的。
本算例在K3精度对应1400万求解点的情况下,使用1张RTX 4090显卡,约2.5小时可以转1圈。
|
软件类型 |
流量(kg/s) |
|
Dimaxer(工况1) |
0.3320 |
|
某进口商业软件 |
0.346 |
|
Dimaxer(工况2) |
0.3317 |
Dimaxer 工况1
某进口商业软件
Dimaxer 工况2
从上述流量数据可以看到,Dimaxer计算结果与进口商业软件RANS计算结果相近;从速度云图可以看到,Dimaxer计算结果能够捕捉到更多的流动细节。
交界面展示
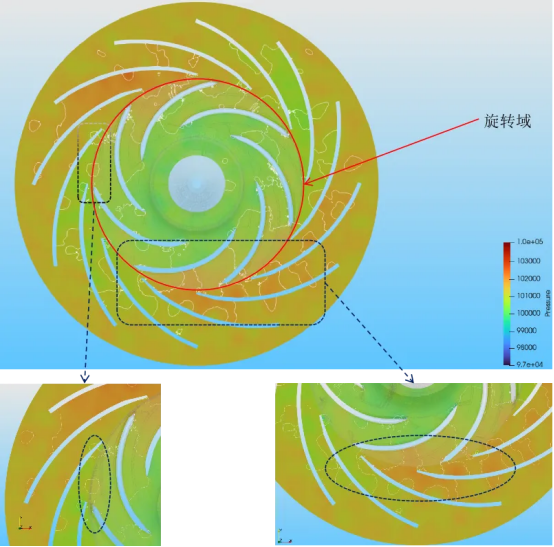
压力等值面图
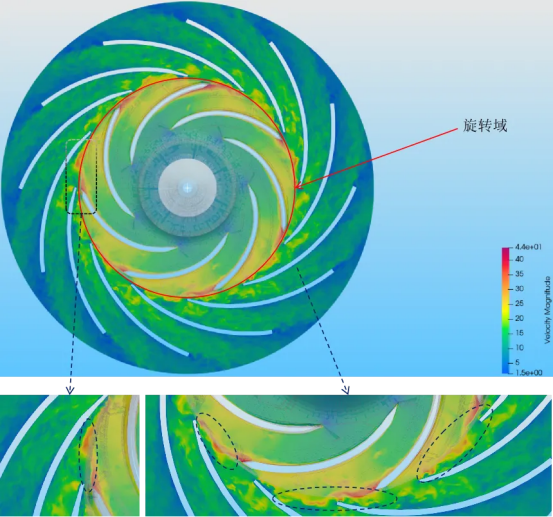
速度云图
从上述云图中可以看到,在动静交界面处,旋转域与静止域的流场连续性良好,流动细节无损失。充分说明采用 Dimaxer 软件动网格方法进行旋转机械的仿真可以获得高精度解析结果,动静交界面处无精度损失。
总结
Dimaxer 2024R1支持不同精度仿真,用户可以根据需求灵活选择精度(支持5阶精度)。对Genova离心泵进行仿真计算时,首先采用从k1精度到k3精度的计算方式,能够在更短的时间内获得稳定的流场信息。其次,通过对比两种不同PLC工况结果表明,PLC权重越少,对于流场与涡的捕捉效果越好,能够获得更加精准的流场信息。















